Skip to the content
Close
home
about
exhibitions
publications & patents
lectures & reviews
contact
Search For…
Search
RAMON ELIAS WEBER
Search
Menu
Search For…
Search
Close
Author
rewdesign
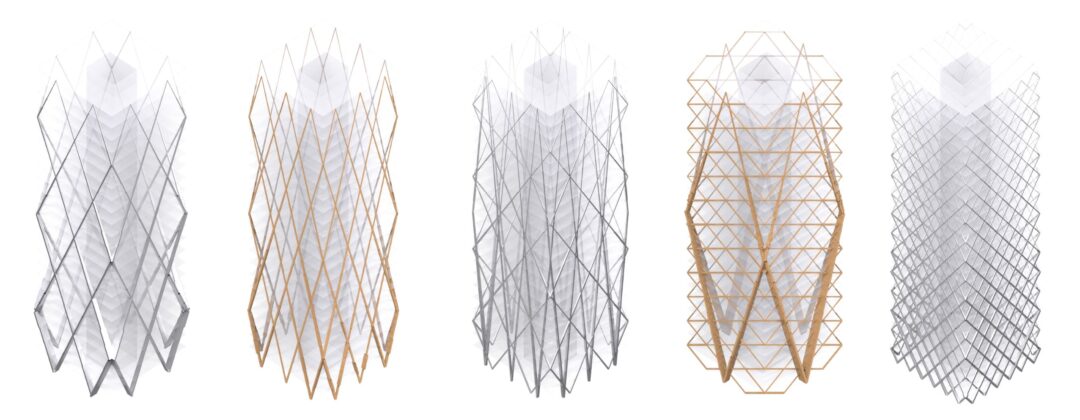
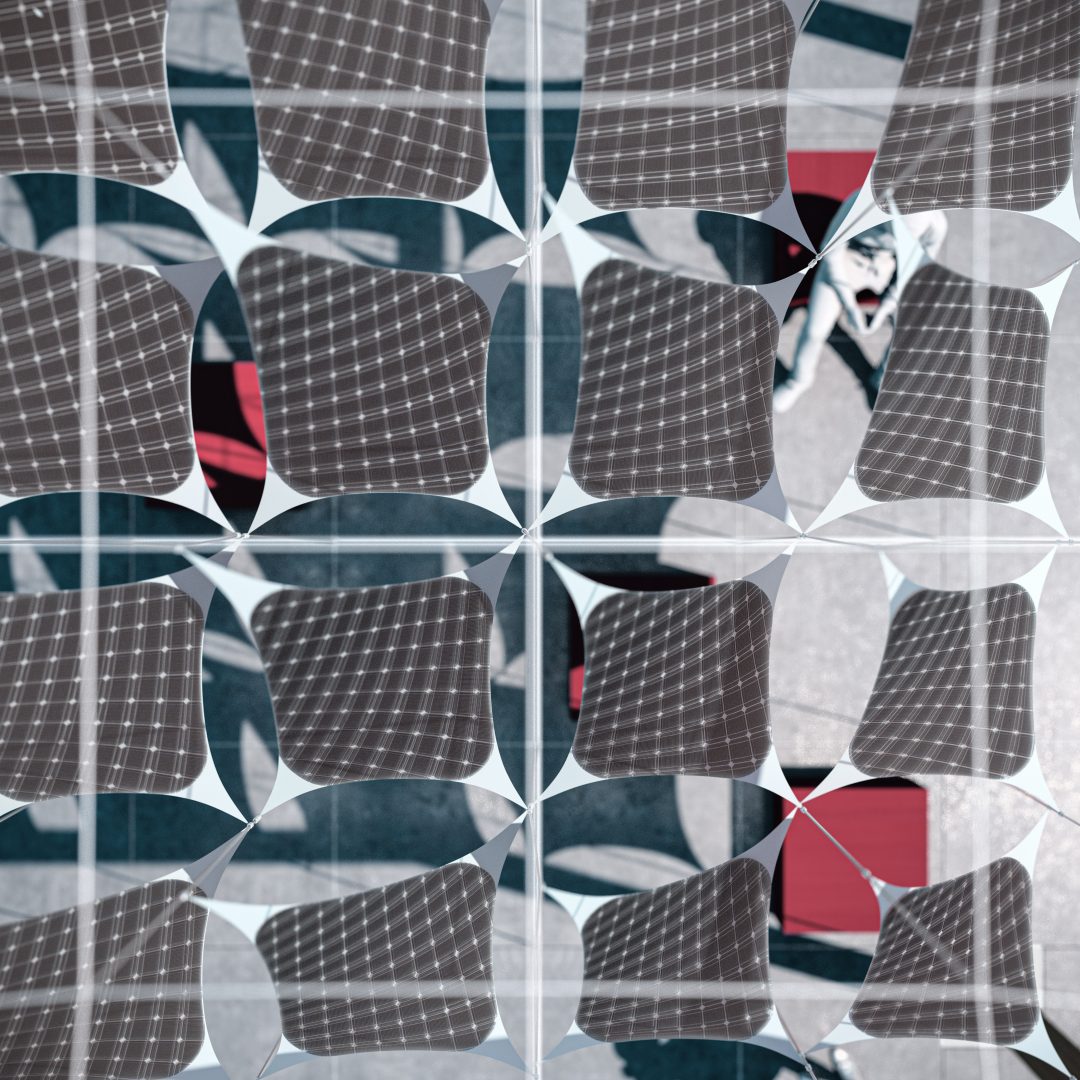
solar exoskeletons – 2022
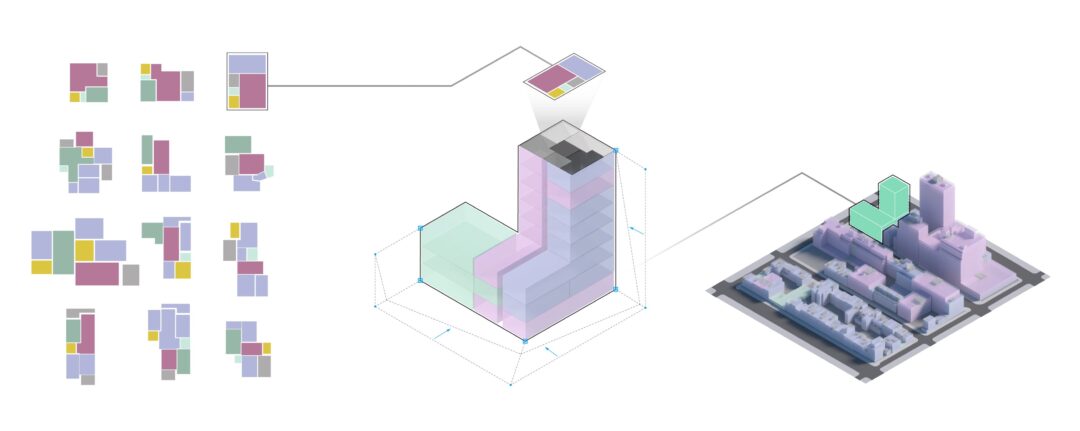
automated floorplan generation in architectural design – 2022
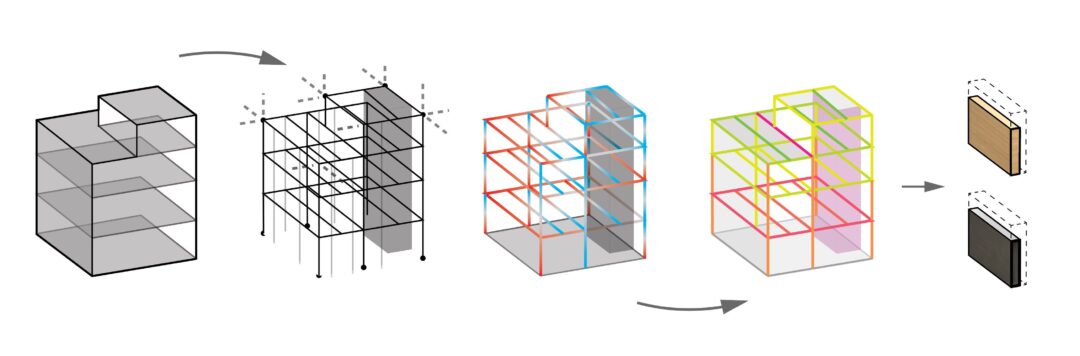
generative structural design for embodied carbon estimation – 2021
aguahoja II – 2018
ÜBER NULL – 2023
building for zero – 2021
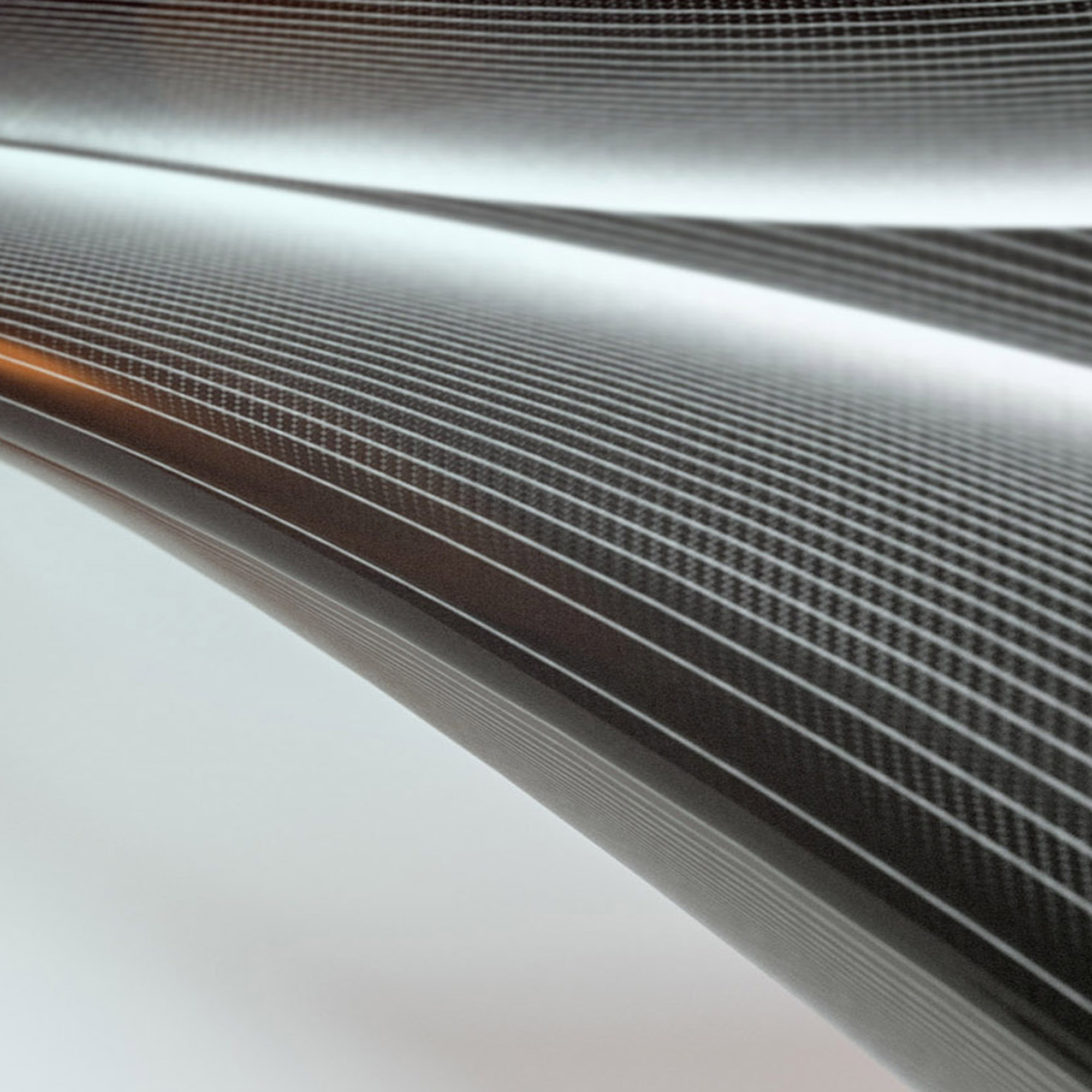
mille-feuille – 2020
photon mapping – 2020
refugee school – 2016
robotic timber – 2019
kinetic composites – 2017
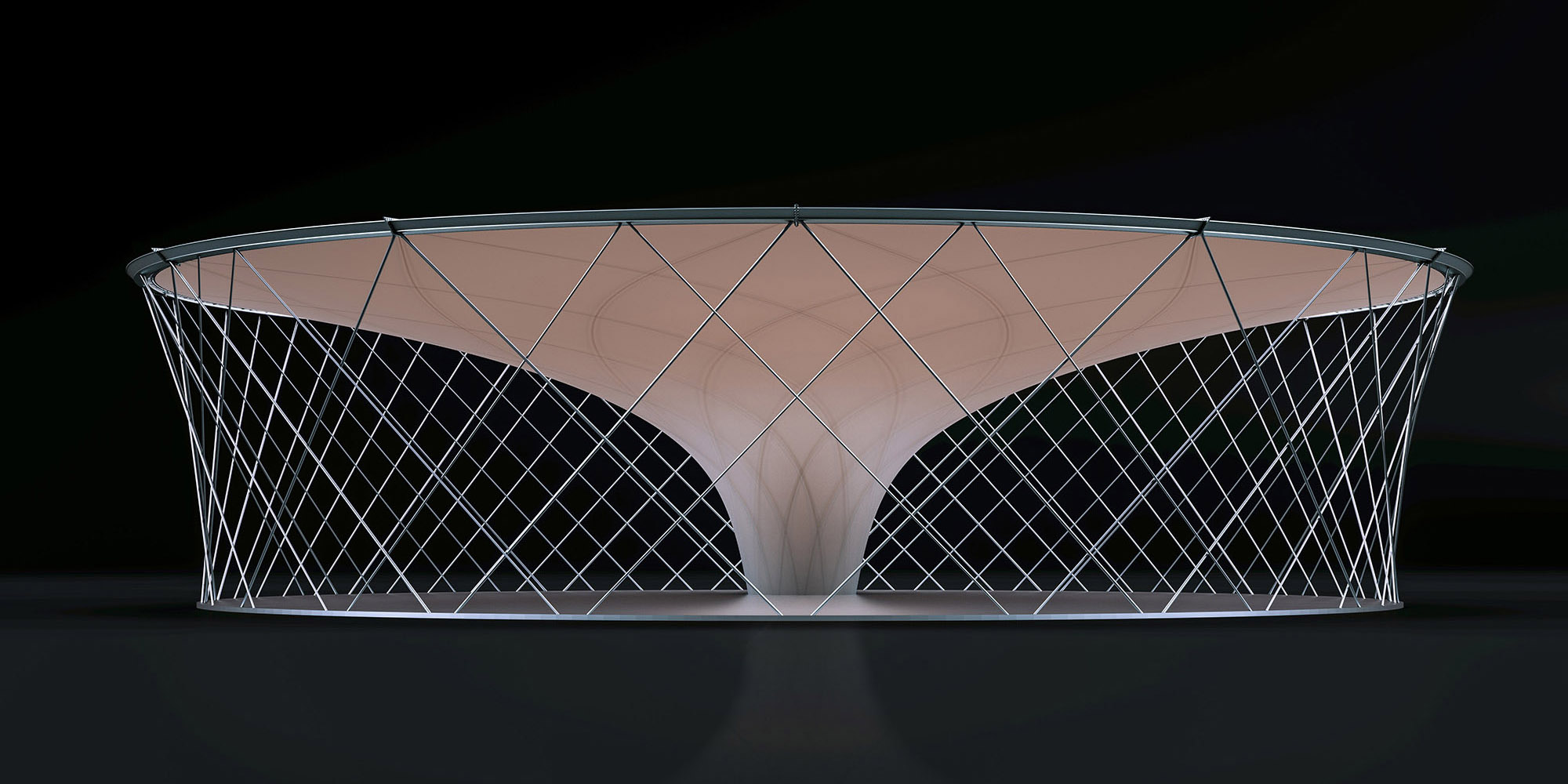
flying funnel – 2017
scala – 2018
pluma – 2021
the winton gallery, science museum – 2016
voxelcrete – 2017
hybrid materiality – 2017
danjiang bridge – 2015
abstract horizon – 2013
de fragment – 2014